Youtube - Nevermore Controller
Hier entsteht das Installationstutorial für den Nevermore Controller. Vielen Dank an den Ersteller: SanaaHamel
Die folgende Anleitung beinhaltet nur die Einrichtung der elektronischen Komponenten. Der ein Filtersystem wird zeitnah ergänzt:
- Aufbauanleitung Stealthmax Filtersystem: folgt demnächst
- Aufbauanleitung Paean Filtersystem: folgt demnächst
Benötigte Hardware
Diese Bauteile werden für den Nevermore Controller benötigt:
Zwingende Komponenten:
1. Über Amazon:
Pico W: https://amzn.to/3vktXTN oder Pico W mit Pinleiste: https://amzn.to/3vktXTN
BMP240: https://amzn.to/3NHYp0E
SGP40: derzeitig nicht bestellbar
Jumper Wire (female to female): https://amzn.to/3RKTQ8c
2. Über Aliexpress:
SGP40: https://s.click.aliexpress.com/e/_DmCfMXf
BME240 (3xBME240 3.3V): https://s.click.aliexpress.com/e/_Dndm8PX
Optionale Komponenten:
Display: https://amzn.to/3tDxj3O
Display: https://www.aliexpress.com/item/1005006111616872.html
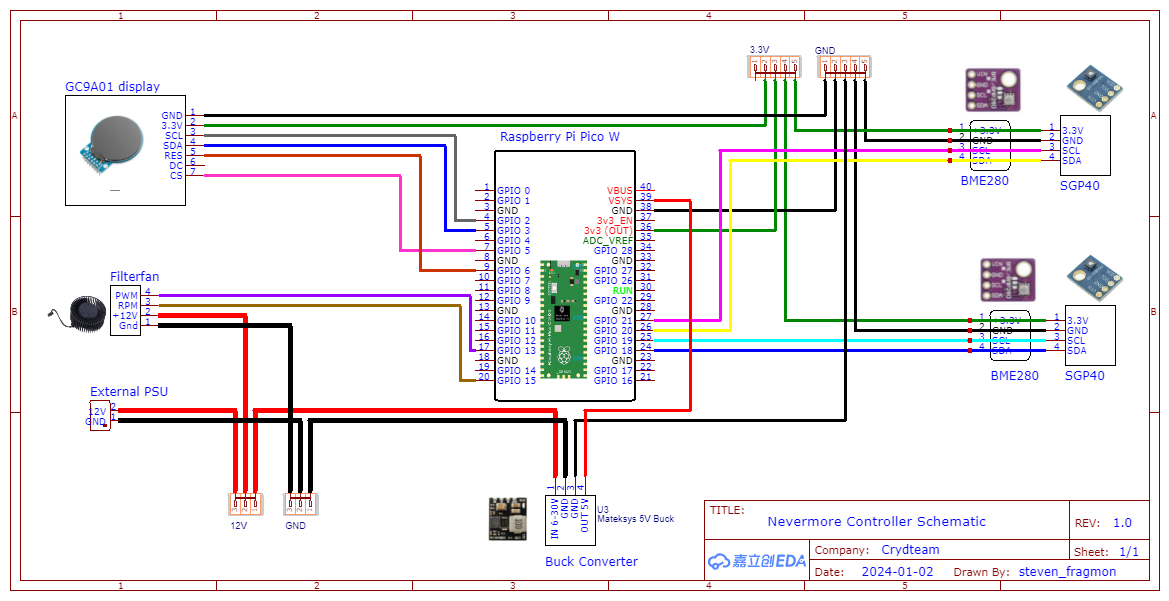
Schaltplan
a) Anschlussbelegung des Raspberry Pi Pico mit GC9A01 Display
In dieser Anordnung werden die Sensoren (BME und SGP) durch eine Pinleiste übereinandergestapelt. Der Plastikabstandshalter soll zwischen den Platinen platziert werden. Stelle sicher, dass der SGP40-Sensor nach außen gerichtet ist, um eine optimale Detektion zu gewährleisten. Der Sensor des lilafarbenen Sensors kann zwischen dernLeiterplatten montiert sein.
b) Anschlussbelegung mit Komfort PCB (Isiks)
folgt bald
c) Anschlussbelegung mit Pico Display
folgt bald.
Verkabelung testen
Schaltplan a)
Um die Verkabelung der Sensoren zu prüfen habe ich ein Micropythonskript geschriebengeschrieben. welches die Anschlüsse testet.
Um den I2C-Bus zu überprüfen, gehe wie folgt vor:
1. Lade MicroPython auf den Raspberry Pi Pico herunter und flashe es. Link: [https://www.raspberrypi.com/documentation/microcontrollers/micropython.html](https://www.raspberrypi.com/documentation/microcontrollers/micropython.html)html
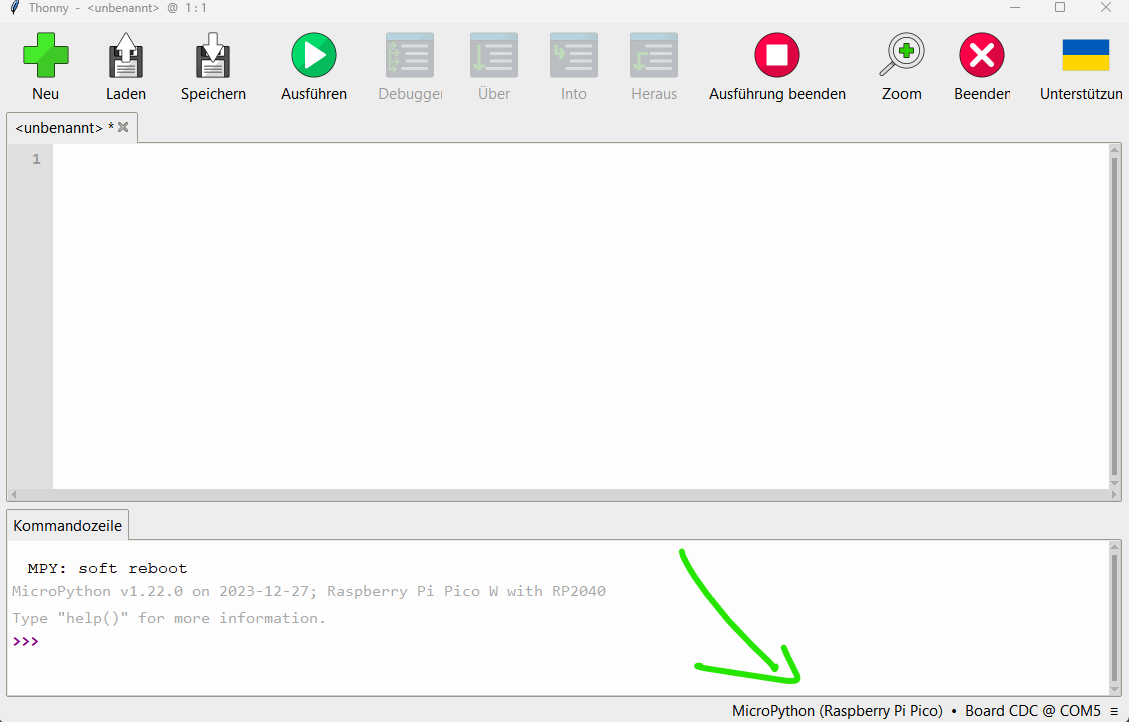
2. Lade Thonny herunter und installiere es.
Link: [https://thonny.org/](https://thonny.org/)org
3. Starte Thonny und wähle deinen Raspberry Pi Pico aus.
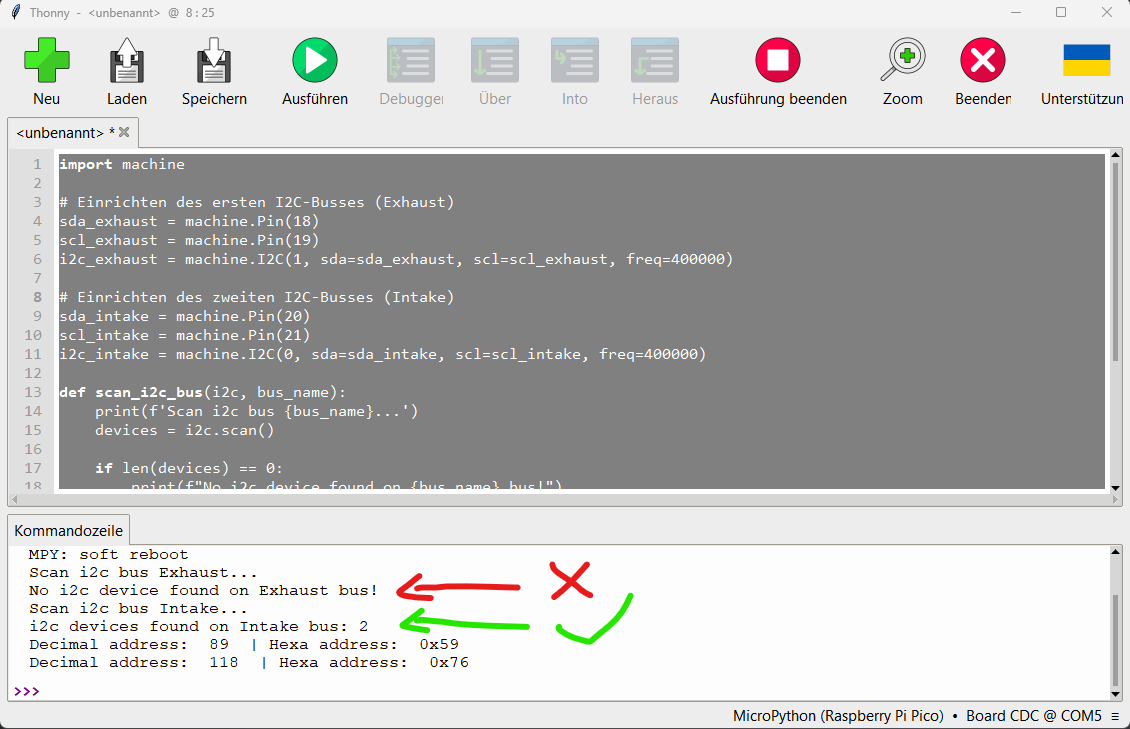
4. Kopiere und füge diesen Code ein:
import machine
# create first i2c bus (Exhaust)
sda_exhaust = machine.Pin(18)
scl_exhaust = machine.Pin(19)
i2c_exhaust = machine.I2C(1, sda=sda_exhaust, scl=scl_exhaust, freq=400000)
# create second i2c bus (Intake)
sda_intake = machine.Pin(20)
scl_intake = machine.Pin(21)
i2c_intake = machine.I2C(0, sda=sda_intake, scl=scl_intake, freq=400000)
def scan_i2c_bus(i2c, bus_name):
print(f'Scan i2c bus {bus_name}...')
devices = i2c.scan()
if len(devices) == 0:
print(f"No i2c device found on {bus_name} bus!")
else:
print(f'i2c devices found on {bus_name} bus:', len(devices))
for device in devices:
print("Decimal address: ", device, " | Hexa address: ", hex(device))
# Scan I2C-Bus
scan_i2c_bus(i2c_exhaust, "Exhaust")
scan_i2c_bus(i2c_intake, "Intake")5. Überprüfe die Antwort: Wenn die Meldung "Kein I2C-Gerät gefunden" erscheint, solltest du die Verkabelung überprüfen oder den Chip ersetzen. Bei Nutung von zwei Sensorstacks müssen insgesamt vier Adresse angezeigt werden.
Schaltplan b)
folgt demnächst.
Schaltplan c)
folgt demnächst.